






The International Workshop on Image Analysis Methods for the Plant Sciences (IAMPS) seeks to bring together scientists and industrials actively engaged with the development of techniques for image analysis and tools addressing problems in Plant Sciences. The IAMPS workshop aims at reviewing the image analysis methods and approaches currently being used and developed, identifying generic image analysis challenges arising from Plant Sciences. It will serve as a forum to facilitate knowledge exchange and collaboration within the community.
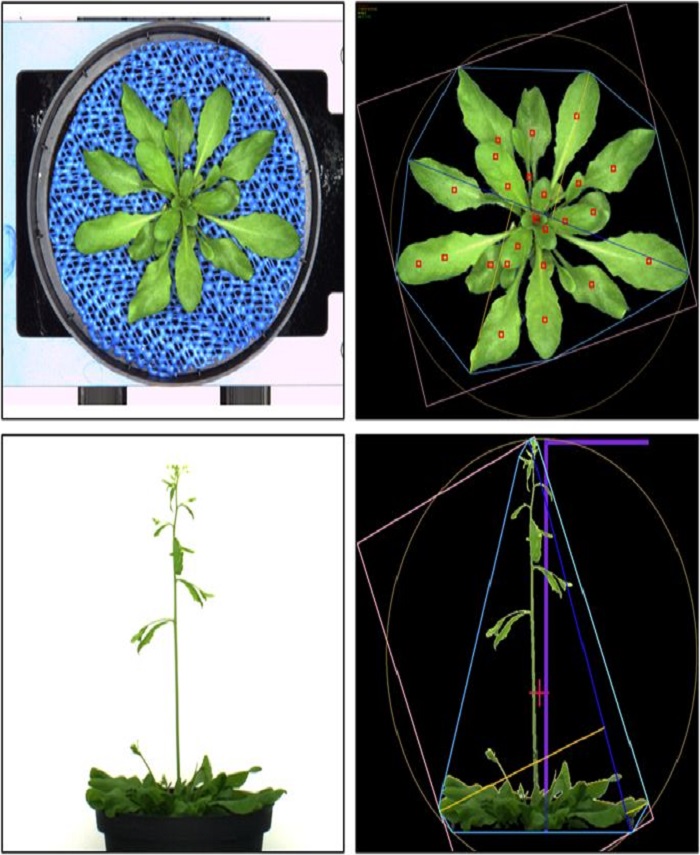
Image processing to measure structural and functional plant properties
Deep learning methods to recognize, segment and analyze plant species

Application of remote sensing at scale for nature recognition and monitoring
Computer based modeling and simulation of plant organs and lifecycles

Robotics for plant sciences, plant sciences for robotics : when nature and machines work together
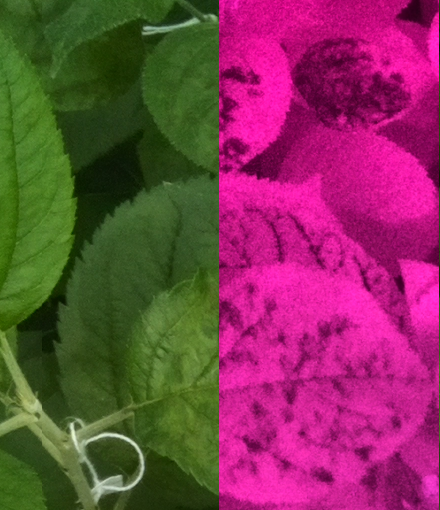
Color, infrared and multispectral imaging for plants
This year IAMPS is opening up to robotics for plants and to plant-inspired robotics.
Robotics for Plants, Plants for Robotics
Robotics is more and more essential in many aspects of our human life, but also in plant life. Many robots are currently being developed to take care of plants: for example, to monitor their well-being, to propose new strategies to reduce the use of pesticides in agriculture, for crop phenotyping, or for automatic harvesting. The first part of this presentation will present some relevant works related to the use of robots for plant monitoring and cultivation with focus on image processing approaches used in these works. In the second part of this talk, we will review main works in the fields of Bio-inspiration , Bio-hybridation and Ecosustainability : when robotics takes inspiration from plants at different levels. We will investigate their key issues, goals and interests, with a special focus on the use of plants for eco-design purpose at LS2N

Dr. Sebastien Briot received the PhD degree from the National Institute of Applied Sciences (INSA) of Rennes (France) in 2007. He worked at the Ecole de Technologie Superieure of Montreal (Canada) as a postdoctorate fellow in 2007-2008. He was recruited at CNRS in 2009 and he is currently working as CNRS researcher in the Laboratory of Digital Sciences of Nantes (LS2N, France). Since 2017, he is the head of the ARMEN research team at LS2N. His research fields concern the design optimization of robots and the analysis of their dynamic performance. He contributed to the eco-sustainable design of robots by using plant-based bio-sourced materials for robot design purpose and also studied the impact of sensor-based controllers on the robot performance. Dr. Briot received the Award of the Best Ph.D. Thesis in Robotics from the French CNRS Research Group in Robotics for year 2007. In 2011, he received two other awards: the Award for the Best Young Researcher from the French Region Bretagne and the Award for the Best Young Researcher from the French Section of the American Society of Mechanical Engineering (SF-ASME).
Robotics in agriculture, a new vision
The challenge of reducing environmental impacts of human activities, while preserving production level and human safety, resuires the development of new tools for agriculture. The reduction of chemical products indeed leads to the use of alternative solutions, implying more frequent treatments, and plant monitoring. Such manual operations then arises as time consuming and harmful. As a result, the use of robots then appears as a promising solution for both field surveillance as well as treatments. Nevertheless, the motion control of robots in off-road contexts is still challenging, because of the diversity and uncertainty of conditions and missions to be done. The talk will give an overview of the robotics in agriculture. From actual robots currently marketed to prototypes and new concepts. Different aspects linked to the autonomy in off-road conditions will be described, such as sensors and perception systems (including vision), control purpose, as well as decision making. Throught many examples, the talk will give the current state of the art, the challenges and the prospects of agricultural robots, and their potential interests for social needs.

Roland Lenain is currently research director at Irstea (National Research Centre for Environment and Agriculture) in the unit TSCF (Technology and Information Systems) at Clermont-Ferrand (France). He received a mechanical engineer degree from french institute for advanced mechanics in 2002. He obtained the same year a master degree in mechanical and civil engineering. He defended his PhD in 2005 on the topic of automatic guidance of off-road mobile robots, at University Blaise Pascal (Clermont-Ferrand, France). After completing a post doctoral position in the department of Automatic Control in Lund University (sweden), he joined Irstea in 2006. He supervised several projects and thesis on topic of mobile robot control in harsh environment. He obtained the capability to conduct research in 2011, and currently lead the team Romea (Robotic and Mobility for Environment and Agriculture). He is also in charge of the theme terestrial mobile robotics of the National Research Group on Robotics. His research activities, focused on adaptive and predictive control of mobile robots in the context of natural environment, are deeply applied in the field of agricultural robots.
Authors should submit a paper in English, carefully checked for correct grammar and spelling, addressing one or several areas of plant analysis method development. Each paper should clearly indicate the nature of its technical/scientific contribution, and the problems, domains or environments to which it is applicable.
All submissions must consist in original work (papers must not have been previously published or currently being considered by others for publication) and contain enough details to support results and conclusions.
All papers submitted to IAMPS 2019 should follow the instructions and templates provided in the document here. The whole document should not exceed two A4 pages (including figures, tables and bibliographic references) in PDF format (see templates). Please include at least one figure to illustrate the content of the study and references to clarify the context.
The first page should include: Title of the paper, name, affiliation, city, country and email address of all authors (with an identified corresponding author). A maximum of 5 keywords that best describe the paper should also be included.
All papers should be submitted through the submission platform. Please, click on the Submit paper button or use the following link to submit your abstract to IAMPS 2019.
| Start (included) | July 4th, 2019 |
|---|---|
| End (included) | July 5th, 2019 |
| Papers submission deadline (extended) |
April 22th, 2019 |
|---|---|
| Authors notification (extended) |
May 24th, 2019 |
| Camera ready (last extension) |
June 11th, 2019 |
| Registration (last extension) |
June 11th, 2019 |
You must register to attend to IAMPS 2019.
To carry out your registration (personal registration or institutional registration), please,
return the registration form filled before June 11th, 2019 to the email address:
iamps2019@univ-lyon2.fr.
We may send you a registration invoice and/or visa invitation letter to your contact email upon request.
The workshop registration fee is 200 euros and includes:
After the successful edition in Nottingham in 2018, IAMPS 2019 comes back to France, in the city of Lyon. Lyon is the third largest city of France located in the country's east-central part at the confluence of two rivers, Rhone and Saone. The city hosts two image processing laboratories, including the LIRIS laboratory organizing IAMPS 2019 and having researchers working on plants. It is also home of the Jardin botanique de Lyon (8 hectares), inside the Parc de la Tete d'Or (literally, Golden Head Park), a municipal botanical garden opened weekdays without charges. The garden was established in 1857 as a successor to earlier botanical gardens opened in 1796, and now describes itself as France's largest municipal botanical garden. The Parc de la Tete d'or, in central Lyon, is the largest urban park in France at 117 hectares. A total 427 hectares of the historic site of Lyon (Old Lyon) are classified as World Heritage Sites by UNESCO.
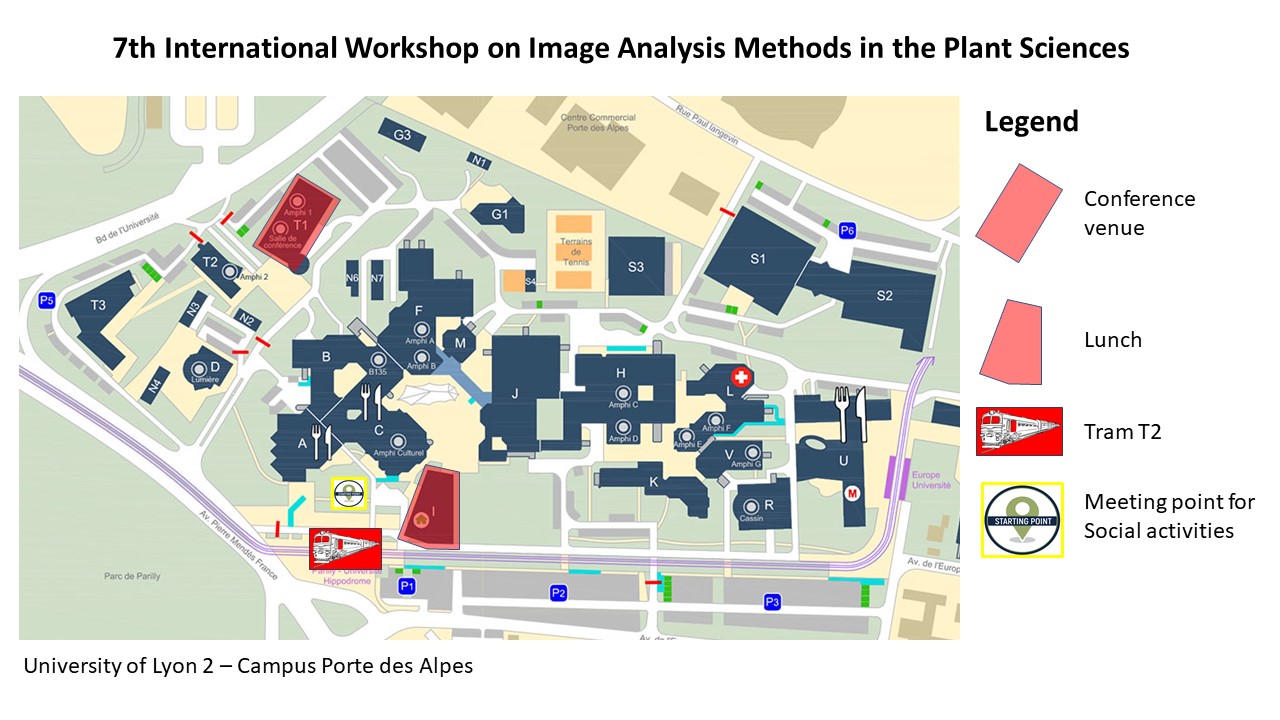
The conference IAMPS 2019 will be held in the University Lumiere Lyon 2.
Universite Lumiere Lyon 2
Campus Porte des Alpes
5 avenue Pierre Mendes France
69676 Bron, France
✈ By plane
From Lyon Saint-Exupery airport, take the tramway RhoneExpress to the city centre (30 minutes), terminus Lyon Part-Dieu (main train station). From the train station Lyon Part-Dieu, take the public transport TCL to reach the campus. We recommend taking the city tramway T4 to Hopital Feyzin Venissieux, change at Jet d'Eau - Mendes France (15 minutes ride) for the city tramway T2 to Saint Priest Bel Air. Alight at Parilly-Universite (25 minutes ride).
🚆 By train
From the train station Lyon Part-Dieu, take the public transport TCL to reach the campus. We recommend taking the city tramway T4 to Hopital Feyzin Venissieux, change at Jet d'Eau - Mendes France (15 minutes ride) for the city tramway T2 to Saint Priest Bel Air. Alight at Parilly-Universite (25 minutes ride).
From the train station Lyon Perrache, take the public transport TCL to reach the campus. We recommend taking the city tramway T2 to Saint Priest Bel Air. Alight at Parilly-Universite (35 minutes ride).